有效的溝通需要合適且恰當?shù)恼Z言與方式,這個原則不僅適用于人類之間的溝通,同時也適用于系統(tǒng)電源管理。一般電源供應(yīng)器的控制與監(jiān)控通常透過各式各樣的外部界面來進行,例如:輸出電壓調(diào)變(透過電源外部提供一特定電壓準位至電源供應(yīng)器的控制端,以遠端的方式調(diào)變電源供應(yīng)器的輸出電壓)、電源狀態(tài)顯示(最簡單也最常見的的方式多是以LED燈色變化來表現(xiàn))以及Power Good信號(電源供應(yīng)器的輸出電壓正常輸出后,立即提供信號通知系統(tǒng)端)等…都是常見的監(jiān)控需求。以上的方式或許適用于大部分的應(yīng)用場合,但卻無法滿足需要同時掌握電源信息并進行電源狀態(tài)監(jiān)控的使用者。因為不同的界面標準需要不同的控制信號與配線方式,如果又要同時使用多機并聯(lián)控制時則很容易產(chǎn)生系統(tǒng)配線錯誤或信號傳遞不良等問題。
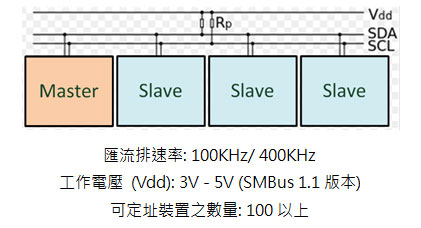
PMBus(電源管理總線之縮寫)使用雙向通信:串行數(shù)據(jù)線(SDA)及串行時鐘線(SCL)。也就是說每一臺電源供應(yīng)器(slave)只需要3條信號線(含一條GND線)連接至BUS端,即可透過控制器(master)達到控制及監(jiān)控讀取電源供應(yīng)器信息之需求。這樣不僅可以大幅縮減控制及信號線的使用量,相對的減少了許多線路上的接點,降低線路不良之發(fā)生機率也同時增加了控制的便利性。PMBus應(yīng)用的領(lǐng)域相當廣泛,在工業(yè)自動化應(yīng)用設(shè)備及通信應(yīng)用設(shè)備中對電源狀態(tài)的監(jiān)控需求是最常見的。
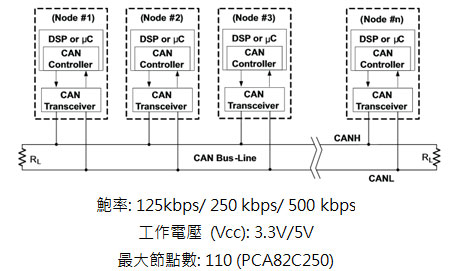
CANBus(控制器區(qū)域網(wǎng)路)使用雙線差動(CANH及CANL)傳輸技術(shù),原先是開發(fā)來取代復(fù)雜的汽車內(nèi)部配線。但因它具備高度的抗電氣噪聲干擾及自我除錯能力,也漸漸廣泛的被使用于工業(yè)及自動化系統(tǒng)中,包含電源產(chǎn)業(yè)等。
使得產(chǎn)品應(yīng)用范圍可以延升至服務(wù)器、IT產(chǎn)業(yè)、網(wǎng)絡(luò)及通信產(chǎn)業(yè)等。而充電機型:PB-1000以及即將推出的RPB-1600及RCB-1600系列也均將CANBus功能列為選購配備,非常適用于電池充電站/交換站及各類電動摩托車充電等應(yīng)用。
如何提升CAN bus的信賴度?
因為為差動訊號,增加終端電阻于總線的兩側(cè)最終端可以降低訊號反射,進而提升CAN bus的信賴度。合適的電阻為120 ohms +/- 10 ohms及最小功率 220mw。
CAN bus協(xié)議通訊最長有效通訊距離?
明緯CAN bus符合ISO 11898、bus rate為250kbps,有效通訊距離為150m或以上。
為何使用CANbus通訊時,輸出電流無法調(diào)成0A?
當使用CANbus時,該參數(shù)其實是調(diào)整輸出電流的上限保護點,并非調(diào)整輸出額定電流值。更可以把此參數(shù)當成明緯其他工控產(chǎn)品所具有的PC功能來理解。
PMBus與CANBus產(chǎn)品通訊異常
一般無法通訊有以下可能原因:
| 可能原因 | 排除方法 |
| 通訊地址設(shè)定錯誤 | 重新設(shè)定地址并重試 |
| 通訊速率錯誤 | PMBus機型請使用100kHz CAN bus機型 250kbps |
| 電源沒有開機 | 請開機后重試 |
| 通訊線脫落 | 重新配線后重試 |
| 噪聲干擾 | 增加隔離IC以降低噪聲 |